Profiles - Stuurgedrag
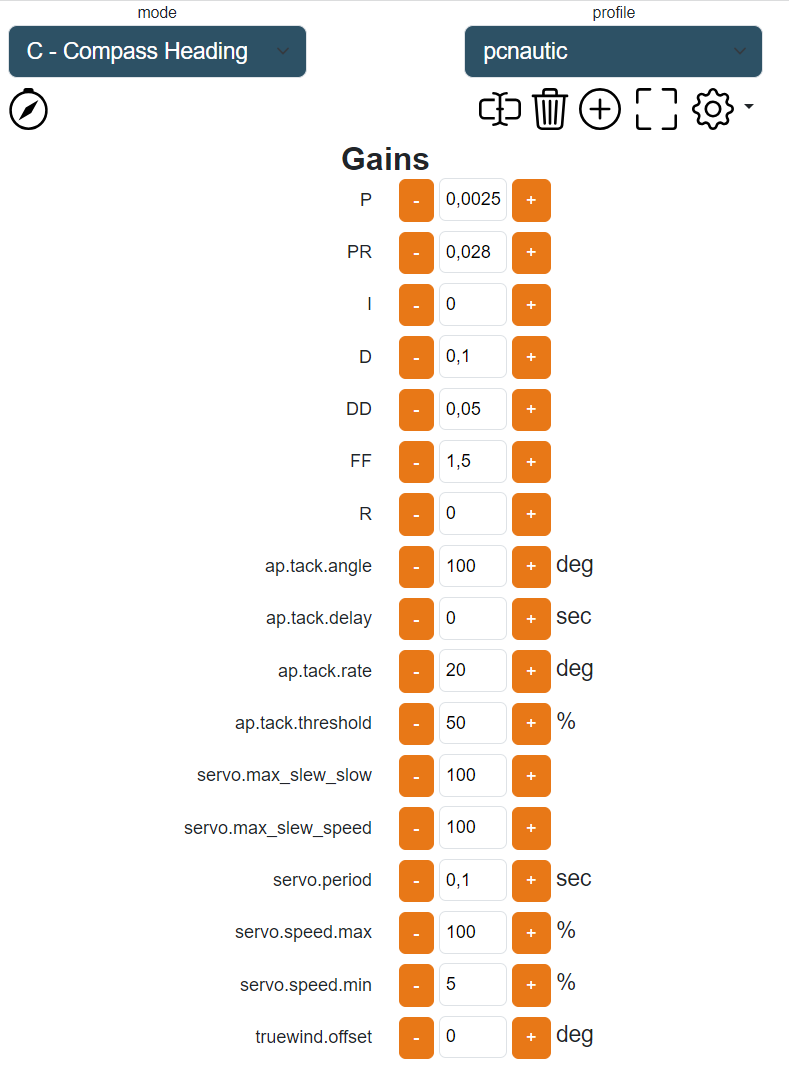
Door op het tandwiel en vervolgens op Profile te klikken komt u op de uitgebreide pagina met de instellingen voor het stuurgedrag, voor het finetunen kies Tuning!
U kunt profielen aanmaken en selecteren, waarbij alles wat het stuurgedrag kan beïnvloeden aanpasbaar is.
Standaard heeft u alleen het default-profiel, waarvan de instellingen niet zijn aan te passen.
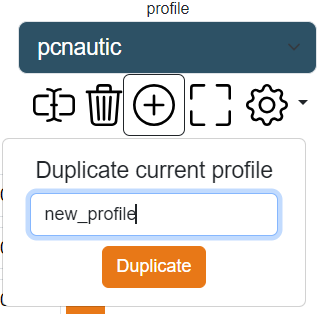
U kunt een nieuw profiel aanmaken door rechtsboven op de + te klikken, de nieuwe profielnaam op te geven en vervolgens op Duplicate te klikken. Het nieuwe profiel is nu aangemaakt en direct geactiveerd. Door op de profielnaam te klikken opent het menu waarbij u het gewenste profiel kunt selecteren / activeren. Dit is ook uiteraard ook mogelijk via het menu van de ControlHead.
Door op de prullenmand te klikken kunt u het geselecteerde profiel verwijderen.
De eenvoudigste manier om het stuurgedrag aan te passen is door alleen de parameters P, D en DD te wijzigen. Voor een volledige beschrijving van alle mogelijkheden zie tuning gains.
Met P wordt de agressiviteit ingesteld. Bij een verhoging hiervan zal de Autopilot sneller / agressiever reageren.
Het is raadzaam om de parameters D en DD tegelijk hoger of lager te zetten. Als u parameter P verhoogt, zal het schip harder gaan draaien en hierbij mogelijk doorschieten na het bereiken van de gewenste koers. Om dit te voorkomen dienen de parameters D en DD te worden verhoogd.
Wordt de ingestelde koers niet bereikt en er te veel tegengestuurd, voordat de gewenste koers is behaald, dan dient u D en DD lager te zetten.
Parameter FF wordt gebruikt als draaisnelheid tijdens een koersverandering, hoe hoger hoe sneller u naar de nieuwe gewenste koers wordt gestuurd.
Overstag instellingen
tack.angle - Overstag hoek in graden:
Hier stelt u het aantal graden in van de overstagfunctie voor gebruik tijdens varen op kompas of GPS koers.
Als u vaart op een wind koers dan neemt de overstagfunctie automatisch de tegenovergestelde koers.
tack.delay - uitstel van overstag:
Hiermee stelt u, indien gewenst, de overstag uit na het activeren, zodat u tijd heeft eerst enkele handelingen uit te voeren voordat de overstag werkelijk begint.
tack.rate - draaisnelheid tijdens overstag:
De tack rate bepaalt de draaisnelheid tijdens de overstag.
tack.treshold - drempelwaarde einde overstag:
Stel deze waarde zo hoog mogelijk in. Draait uw schip toch te ver door na de overstag zet hem dan lager.
Servo = Motor / Drive instellingen:
max_slew_slow / speed - snelheid van versnelling en vertraging
Door deze beide lager te zetten krijgt u een meer vloeiender beweging - dempt het starten en stoppen.
De waarde van slow kan niet lager zijn dan die van speed.
period - minimale tijdsduur van een correctie
In de laagste stand reageert de Autopilot direct op de kleinste verandering met kleine bewegingen.
speed.max/min - maximale en minimale snelheid
Door max lager te zetten begrenst u de maximale snelheid van de drive.
I.c.m. onze drive zien we geen invloed van speed.min
De waarde max kan niet lager zijn dan min.
Last updated